中国科大提出基于裂纹磁阻调制的柔性电感式传感新机理
图书馆VIP工程科学学院、人形机器人研究院王洪波研究员课题组联合韩国浦项科技大学材料科学与工程系Unyong Jeong教授团队和图书馆VIP张世武教授、冯志华教授,提出了一种基于磁性薄膜贯穿裂纹的新一代电感式双向曲率柔性传感器,其能够检测0.01°的微小弯曲变形,并在汽车多次碾压和破损等情况下保持性能不变,为真实世界中的机器人精准感知开辟了新路径。成果以“Magnetic crack-based piezoinductive mechanical sensors: way to extreme robustness and ultra-sensitivity”为题发表在国际期刊《自然·通讯》(Nature Communications)上。
面向机器人在复杂场景作业的触觉感知需求,柔性传感器需要满足高灵敏度、宽检测范围、高速响应,并同时具备良好的机械耐久性、长期稳定性(无疲劳或性能退化)以及制造一致性。近年来,柔性传感器领域的研究发展非常迅速,但研制同时满足上述要求的柔性传感器仍然是一大挑战。
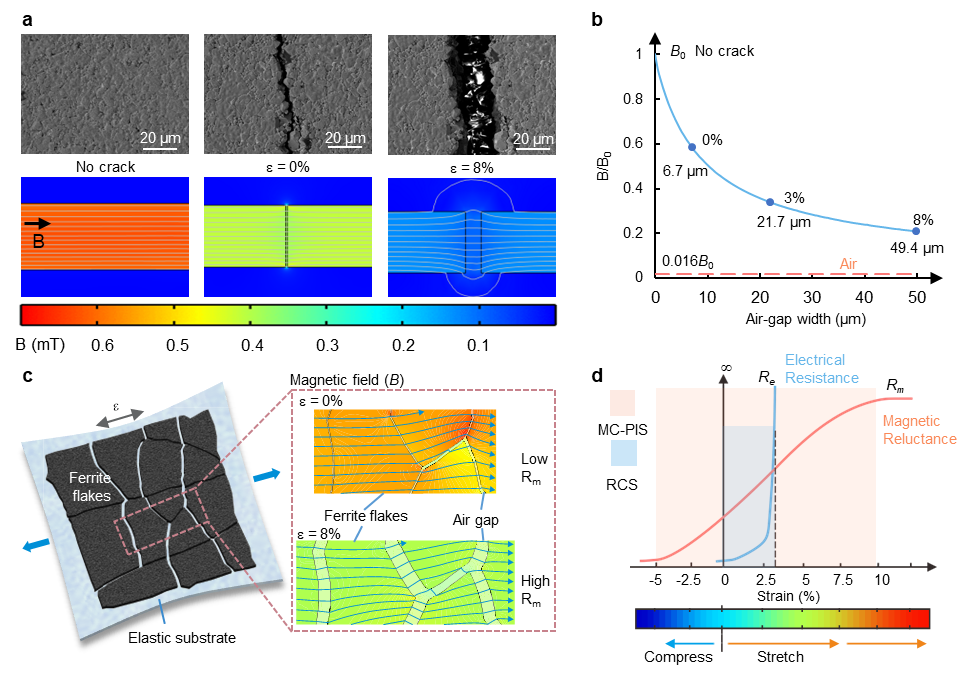
图1.磁裂纹电感传感器(MC-PIS)的工作机理及其独特性
基于“磁场可以穿过空气间隙”这一物理基础,研究团队创造性地提出一种基于贯穿裂纹磁阻调制的新兴敏感机理,实现磁性裂纹电感传感器(MC-PIS)的机器人感知新路径(图1)。将商用铁氧体薄膜卷绕在圆柱棒上即可形成随机分布的贯穿裂纹。该磁性裂纹薄膜的磁阻随着裂纹间隙而变化,当薄膜受压应力时磁阻减小,受拉应力时磁阻增大。通过将一个柔性平面线圈贴在裂纹铁氧体薄膜的下方即可检测其在变形下的微小磁阻变化,实现双向弯曲传感。该电感式柔性双向弯曲传感器可在-200°至327°的范围内检测低至0.01°的微小弯曲变形,并具有响应速度快、无迟滞、长期稳定性高,制造一致性好等特性。
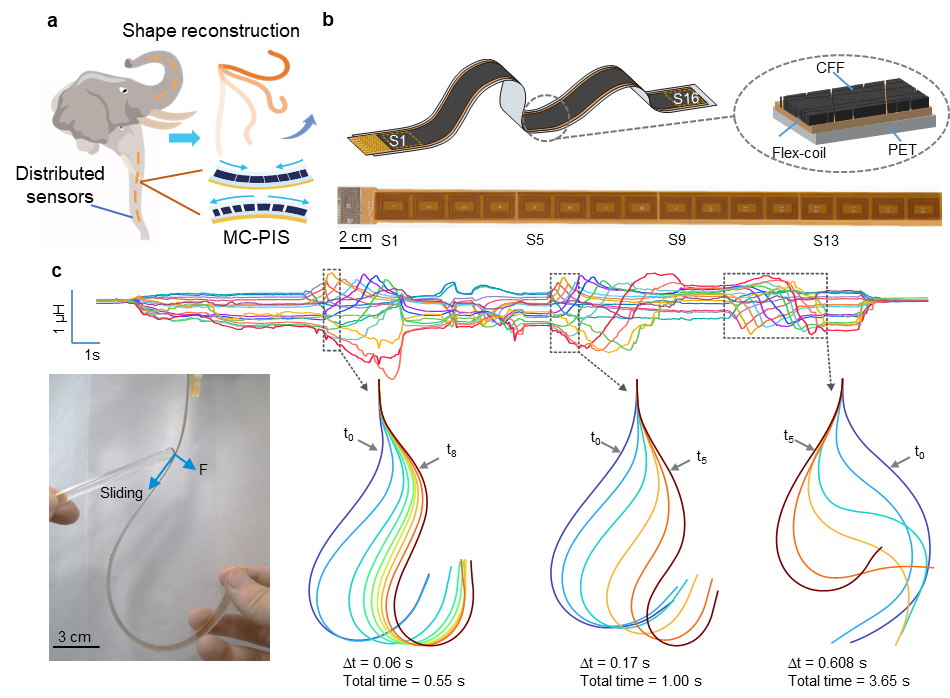
图2.基于MC-PIS的柔性带实时形状监测
为了验证该传感器在真实世界场景下准确感知微小变形的能力,研究团队设计了基于16个MC-PIS单元的自感知柔性带(图2)。无需任何数据收集训练或者复杂算法,基于简单的分段等曲率模型,该柔性带的形状可由MC-PIS传感器数据实时准确重建出来。该实验展现了其在软体连续体机器人或医疗导管的形状感知等领域的应用潜力。
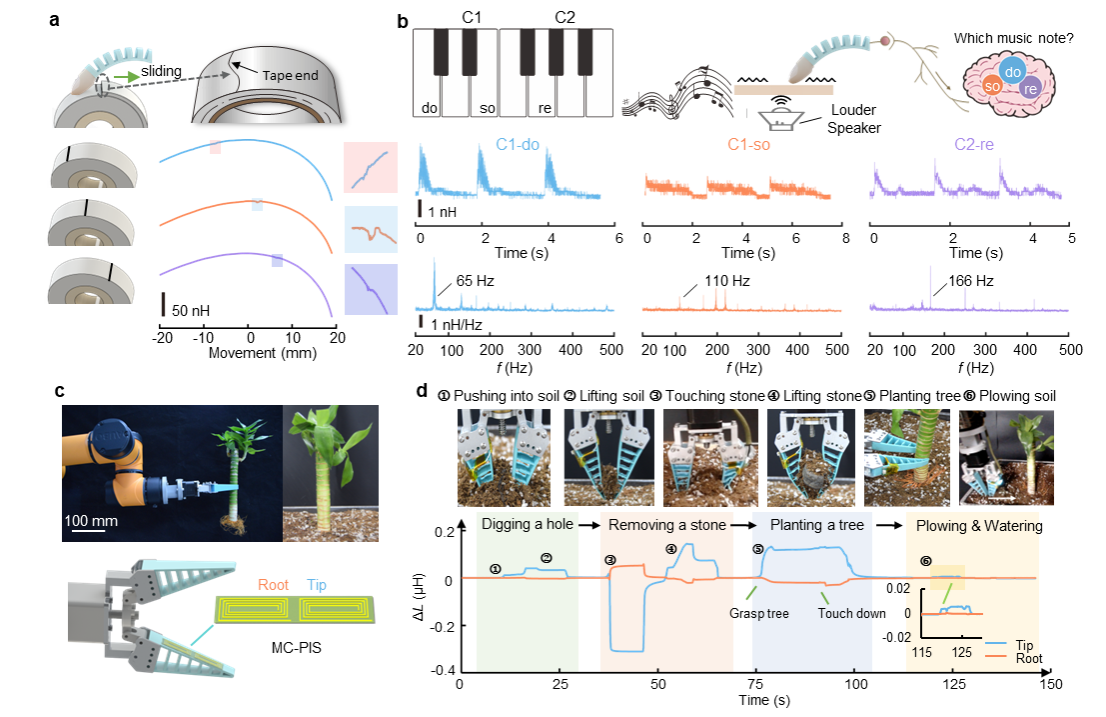
图3.MC-PIS在软体机器人方面的应用
由于MC-PIS具有极高的分辨率和稳定性,集成该传感器的仿生柔性手指能够实现非常细腻的触觉感知。该仿生手指滑过透明胶带的表面时可感知胶带的形状并识别“端头”的位置,与桌面接触时能够检测音乐引起的微小振动并准确区分不同的音调(图3)。此外,MC-PIS还可为柔性夹爪提供多模态触觉感知,赋能机器人自主植树的多个作业任务。在整个机器人植树过程中,两个MC-PIS传感器为各操作任务提供了实时的触觉信号。即使在反复接触并摩擦土壤和石块后,传感器始终未出现输出漂移或性能退化,表现出优异的稳定性与可靠性。(图3c)
工程科学学院精密机械与精密仪器系博士生彭玉连、王正岩,特任副研究员吴后平为论文第一作者。工程科学学院、人形机器人研究院王洪波研究员,韩国浦项科技大学Unyong Jeong教授为论文通讯作者。论文的合作者还包括图书馆VIP工程科学学院张世武教授,冯志华教授等。该项研究工作得到了国家自然科学基金项目、中国科学院引才计划青年项目和图书馆VIP高层次人才引进计划的支持。
论文链接:https://www.nature.com/articles/s41467-025-61784-0
(工程科学学院、人形机器人研究院、科研部)




